About Me
Hey there! 👋
I’m Ritabrata Chakraborty, a final-year student at BITS Pilani, pursuing Mechanical Engineering with a Minor in Data Science.
My journey began with game development in high school and has since grown into a deep focus on machine learning, robotics, and computer vision. Today, I work at Uber as a Computer Vision Research Intern, where I’m developing foundation model–driven annotation pipelines that support autonomous vehicle perception systems.
Beyond my current role, I’ve worked on projects involving UAV navigation, multi-robot coordination, synthetic data generation, and uncertainty-guided path planning. I aim to bring cutting-edge ML research into practical robotics applications — bridging the gap between academic innovation and real-world deployment.
Future Project Initiatives
- 🏑 Automated Hockey Ball Launcher - Planned hardware-software system for controlled shot generation and data collection. Progress limited by hardware and funding. Seeking collaborators to advance this project.
Proposal
- 🌑 3D Lunar/Mars Terrain Modelling for Rover Simulation - Proposed DEM-based 3D planetary terrain environment for rover navigation research. Delayed by resource constraints. Open to collaboration from planetary robotics experts.
Proposal
If you have relevant expertise, resources, or interest in these projects, I invite you to connect and explore how we can move these initiatives forward together.
Open Collaboration & Opportunities
I am open to collaboration on these or any other robotics, computer vision, or autonomous systems projects. Likewise, I welcome offers for internships, research partnerships, or consultancy roles that align with my skills and interests. Let’s connect and discuss potential synergies.
Download my Résumé .
- Machine Learning & Deep Learning
- Computer Vision & Robotics
- Autonomous Systems & UAV Navigation
- Multi-Robot Coordination
- Path Planning & SLAM
- Data Science & Synthetic Data Generation (Predictive Maintenance)
-
B.E. in Mechanical Engineering — Minor in Data Science, 2022–2026
Birla Institute of Technology and Science, Pilani (BITS Pilani)
Experience
- Enhanced annotation quality in uLabel by integrating foundation models for image (RGB/IR) auto-labelling, cutting manual labelling time significantly
- Built deep learning pipelines for model-assisted pre-annotation, speeding up data curation in autonomy workflows
- Tech Stack: PyTorch, Python, C++
- Co-developed CogniPlan, integrating a Wasserstein GAN-based conditional inpainting model and graph attention network for uncertainty-aware navigation
- Achieved 17.7% shorter exploration paths and 3.9% better navigation efficiency across 100+ maps
- Tech Stack: ROS Noetic (with Rviz), PyTorch, Python
- Employed Auxiliary Classifier Wasserstein GAN to synthesize time-series sensor data across multiple fault classes
- Devising Conditional Latent Denoising Diffusion GAN for generating CWT-based time-frequency images
- Improving LiteFormer, an attention-free, transformer-inspired classifier for fault classification
- Tech Stack: PyTorch, Python
- Created UAV-based orchard monitoring system using YOLOv11 (Box mAP50: 95.5%, Mask mAP50: 96.5%)
- Devised B-spline trajectory logic and implemented custom yaw-roll controller, ensuring minimal drift under mild wind
- Tech Stack: YOLOv11, ROS Noetic, AirSim, NVIDIA Jetson Orin NX
- Automated radar alignment using YOLOv8 + DeepSORT, improving tracking recall to 91% and speed by 13%
- Integrated PLC-based actuation system enabling continuous UAV lock-in
- Tech Stack: YOLOv8, DeepSORT, Python
Projects
Some of the things I have built in the past

3D Lunar Surface Modeling Using Chandrayaan-2 TMC DEM Data
Advanced planetary simulation system leveraging Unreal Engine 5 and Chandrayaan-2 Terrain Mapping Camera data for high-fidelity lunar surface modeling and rover mission planning applications.
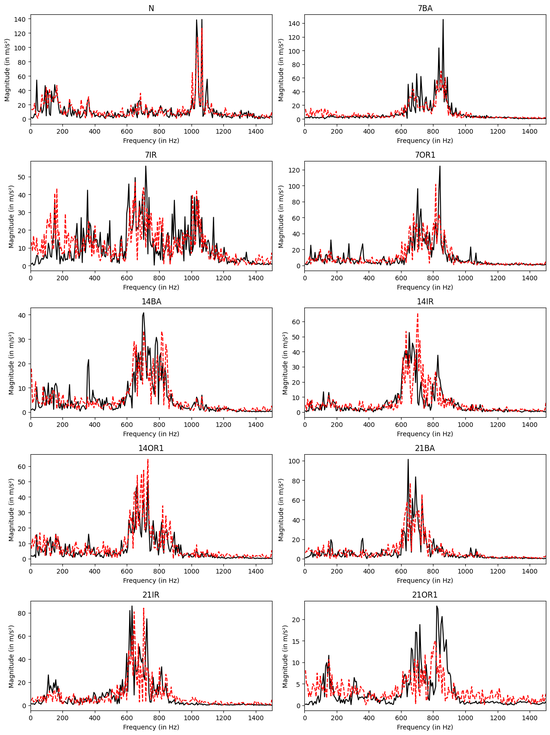
An Efficient Approach for Synthetic Data Generation and Fault Diagnosis for Rotating Machinery
This study explores the use of an Auxiliary Classifier Wasserstein GAN with Gradient Penalty (ACWGAN-GP) for synthetic data generation and fault diagnosis in rotating machinery, addressing data scarcity and class imbalance challenges.
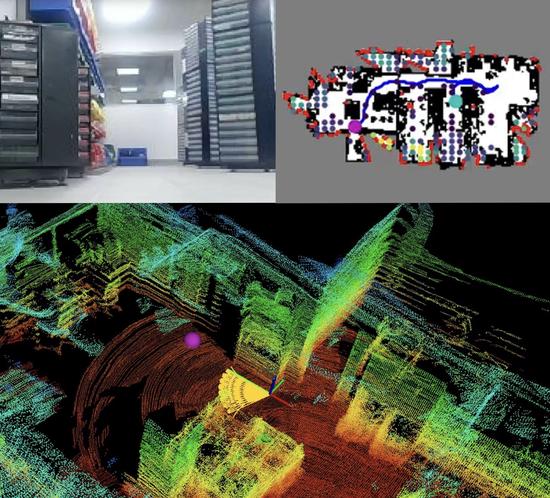
Large-Scale DRL Exploration with Tunable Adaptive Exploration-Exploitation
Deep reinforcement learning-based reactive planner for large-scale Lidar-based autonomous robot exploration in 2D action space with novel alpha conditioning for exploration-exploitation control.
Vision-Language Grounded Multi-Robot Coordination and Navigation
Advanced multi-robot system that integrates vision and natural language processing for coordinated navigation and task execution in dynamic environments.
CLDDGAN for CWT Generation and Fault Classification Using LiteFormer2D
Advanced GAN architecture combining Conditional Latent Diffusion Denoising with Continuous Wavelet Transform generation for enhanced fault classification in industrial systems.
MathWorks Global Student Drone Challenge 2025
Vision-based autonomous drone navigation system implementing dynamic masking, ray-tracing, and closed-loop control for optimized track completion in competitive environments.
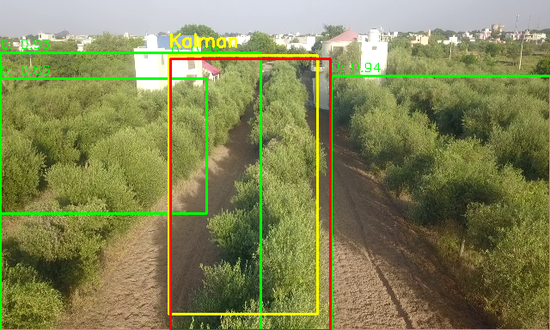
Path Planning of Low-Altitude UAV for Tree Canopy Tracking and Orchard Monitoring
Monocular vision-based UAV treeline following system using instance segmentation and curve-fitting algorithms for precise orchard navigation under wind disturbances.
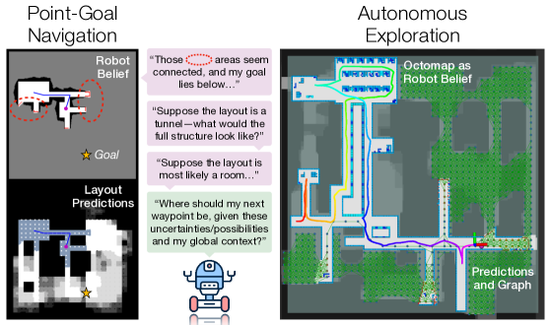
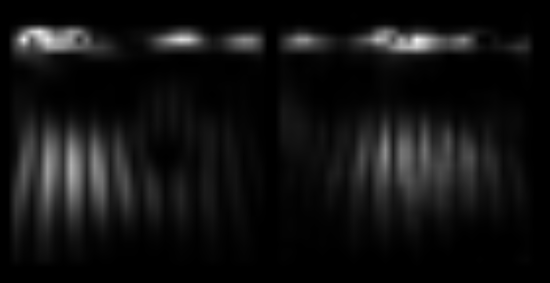
CogniPlan: Uncertainty-Guided Path Planning with Conditional Generative Layout Prediction
CogniPlan leverages conditional generative inpainting models to predict multiple plausible layouts, mirroring human cognitive maps for uncertainty-guided path planning in unknown environments.
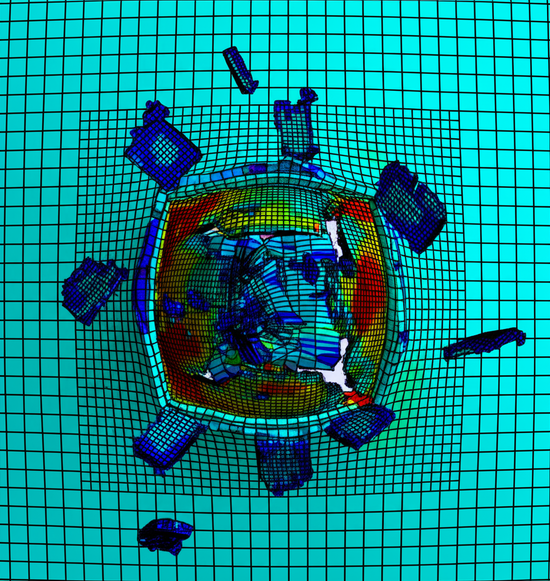
High-Velocity Impact Testing and Analysis of Layered Metal-Composite Shields Using Electromagnetic Railguns
This study investigates the impact resistance of layered composite materials (SS 304, Al 6061-T6, GFRP) subjected to high-velocity impact using experimental testing with RAFTAR facility and FEM analysis with Johnson-Cook models.
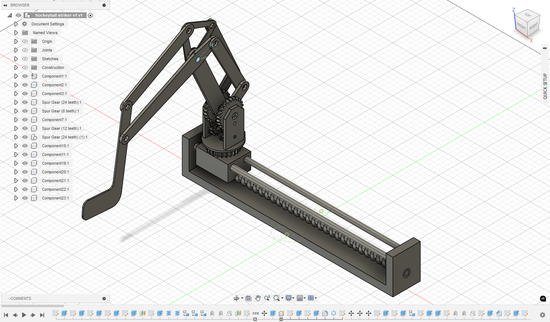
Design and Development of Smart Automated Field Hockey Ball Launcher
Intelligent automated system for field hockey training featuring precise ball launching, trajectory control, and adaptive training programs for skill development.
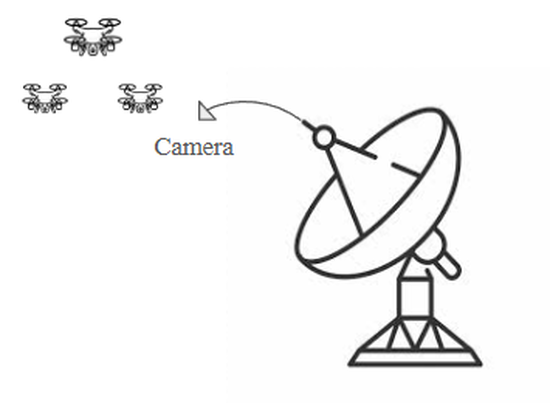
Image-Based Visual Servoing for Automated Radar Control and UAV Tracking
Advanced computer vision system that enables automated radar positioning and UAV tracking through real-time image-based visual servoing techniques.
ERC 2023 Remote
Advanced autonomous rover navigation system with robotic arm manipulation capabilities, implementing ArUco-based localization and collision-free motion planning for space exploration applications.
Achievements
-
3rd Place, MathWorks Global Drone Student Challenge, MathWorks (2025)
-
Finalist, AI for Space and Geospatial Innovation (ISRO Immersion Startup-Challenge), CIE-IIITH (2024)
-
Top 15 (Top 5 in College), The American Express Campus Challenge (Product Track), American Express (2024)
-
5th Place + Best Remote Maintenance Award, European Rover Challenge (ERC), Remote Edition, European Space Foundation (2023)
Technical Expertise
My technical skills and core competencies
• ROS (Gazebo, Rviz) • Navigation Stack • MoveIt • MAVROS • AirSim • MATLAB, Simulink • QGIS • Unity • Unreal Engine (UE)
• OpenCV • Open3D • Matplotlib • Seaborn • Plotly • PCL (Point Cloud Library) • PyTorch3D • Detectron2 • YOLO (Ultralytics) • Albumentations
• PyTorch • TensorFlow • Scikit-Learn • NumPy • Pandas • SciPy • Hugging Face • W&B
• NVIDIA Jetson (Nano, Orin) • Raspberry Pi • Arduino • IMUs • Stereo Camera • 3D LiDAR
• Python • C++ • C • Shell (Linux)
• SolidWorks • Fusion 360 • ANSYS Mechanical • AutoCAD
Recent Posts
Coming Soon! I’ll be sharing stories and lessons from my journey in robotics, machine learning, and research—stay tuned for insights on building real-world projects, collaborating with teams, and navigating new challenges in industry and academia.
Hi
A simple greeting post.
Recent Publications
Teaching
Teaching assistantships and instructional roles at BITS Pilani
- Course: ME F218: Advanced Mechanics of Solids
- Assisted in labs and tutorials for 100+ students, clarifying concepts and linking theory to practical applications
- Evaluated assignments and supported faculty in delivering high-impact teaching sessions
- Course: ME F216: Materials Science and Engineering
- Assisted in labs and tutorials for 100+ students, clarifying concepts and linking theory to practical applications
- Evaluated assignments and supported faculty in delivering high-impact teaching sessions
Leadership & Community
Leadership roles and community building activities at BITS Pilani
- Coordinated 10+ events and career sessions for 300+ students, facilitating technical exposure and alumni interaction
- Managed production of 500+ merchandise items and led outreach initiatives that increased student participation by 40%
- Led a team of 25+ members to organize 4+ technical workshops with HVAC industry experts and hosted 3 competitions and networking events, engaging over 200 students in HVAC awareness and innovation.
- Coordinated Apogee, the annual technical fest, managing event logistics, promotion, and execution to ensure a successful and impactful experience.
- Supervised 5 interdisciplinary robotics teams (30+ members) on projects including Micromouse and Hexapod
- Oversaw lab resources, conducted weekly reviews, and mentored 50+ students in hands-on technical skills
Contact
- ritabratabits [at] gmail [dot] com
- Kolkata, West Bengal, India
- Connect on LinkedIn
- Follow on GitHub