My Projects
Some of the things that I have built in the past!
A novel approach combining importance sampling with DDPG for improved deep reinforcement learning performance and sample efficiency.
Advanced planetary simulation system leveraging Unreal Engine 5 and Chandrayaan-2 Terrain Mapping Camera data for high-fidelity lunar surface modeling and rover mission planning applications.

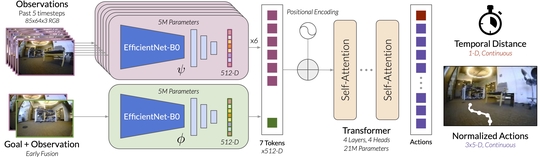
CogniPlan enhancement with cross-attention mechanisms and ViNT integration for semantic-aware adaptive exploration.
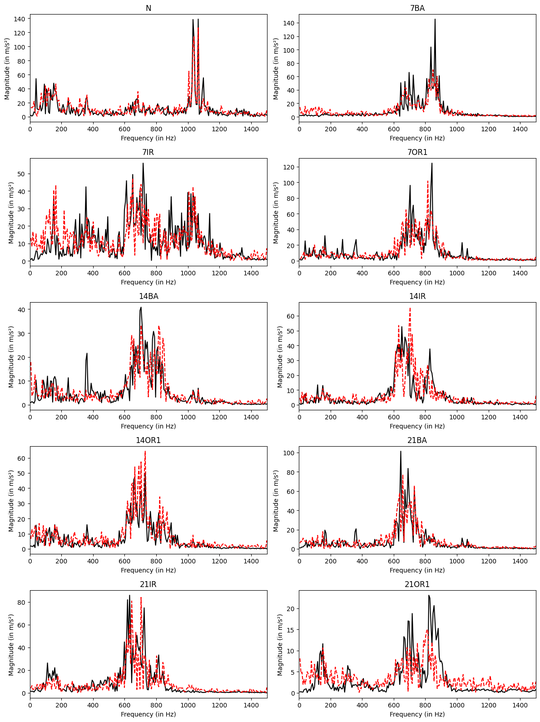
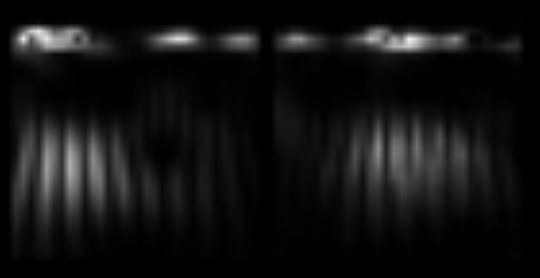
This study explores the use of an Auxiliary Classifier Wasserstein GAN with Gradient Penalty (ACWGAN-GP) for synthetic data generation and fault diagnosis in rotating machinery, addressing data scarcity and class imbalance challenges.
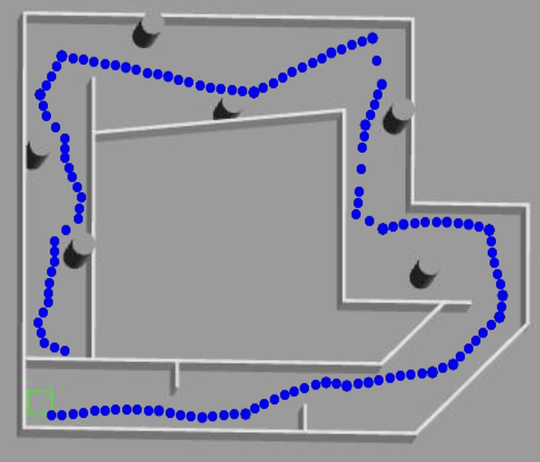
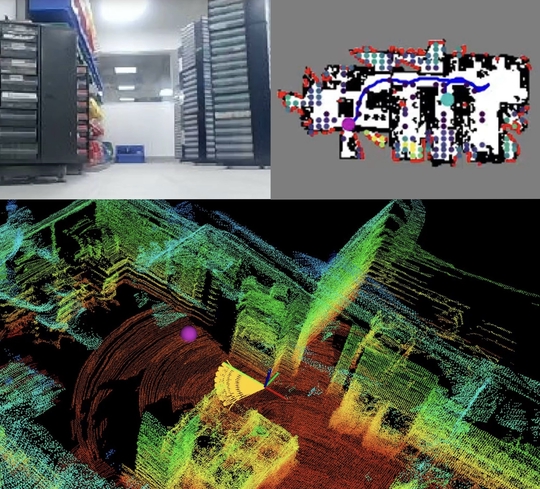
Deep reinforcement learning-based reactive planner for large-scale Lidar-based autonomous robot exploration in 2D action space with novel alpha conditioning for exploration-exploitation control.
Advanced GAN architecture combining Conditional Latent Diffusion Denoising with Continuous Wavelet Transform generation for enhanced fault classification in industrial systems.
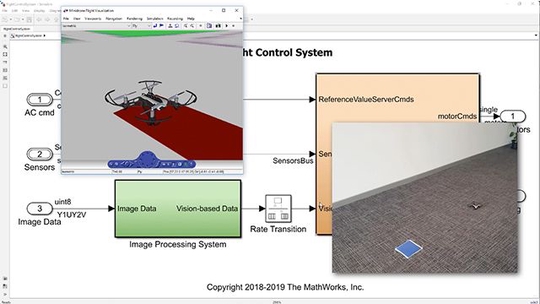
3rd place autonomous drone navigation system using vision-based control with masking, ray-tracing, and closed-loop yaw control.
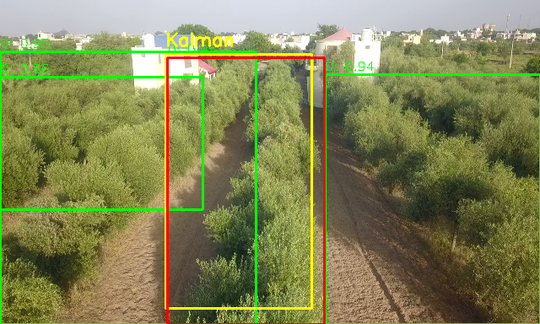
Monocular vision-based UAV treeline following system using instance segmentation and curve-fitting algorithms for precise orchard navigation under wind disturbances.
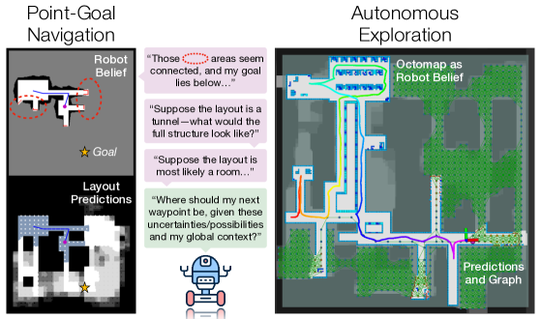
CogniPlan leverages conditional generative inpainting models to predict multiple plausible layouts, mirroring human cognitive maps for uncertainty-guided path planning in unknown environments.
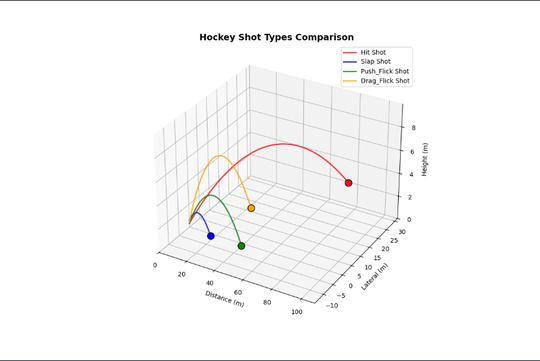
3D ball trajectory reconstruction achieving 0.76m RMSE and shot classification with 96.4% accuracy using TCN-attention.
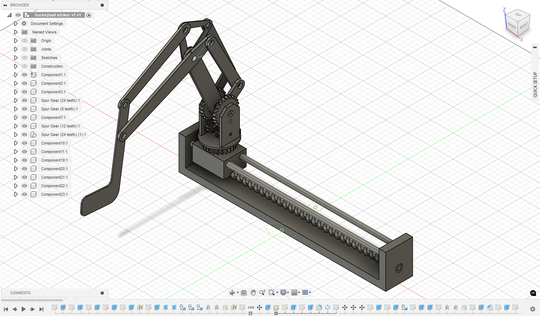
FEM-validated hockey ball launcher achieving 150 km/h with CFRP composite design and safety factor 2.07 at 496 RPM.
5th place + Best Maintenance Award - ExoMy rover navigation with UR3 arm manipulation using ArUco detection and MoveIt motion planning.
