MathWorks Global Student Drone Challenge 2025
 Autonomous Drone Navigation System
Autonomous Drone Navigation System
Competition Result: 3rd Place (2025)
Overview
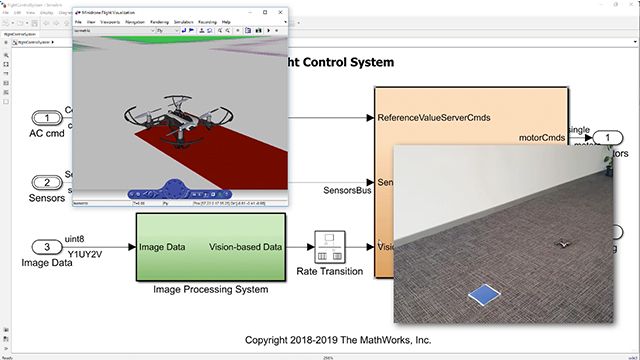
Developed an autonomous drone navigation system for the MathWorks Global Student Drone Challenge, achieving 3rd place through advanced vision-based control algorithms and optimized flight performance.
• Programmed vision-based control for Parrot Mambo drone using masking, ray-tracing, and closed-loop yaw control
• Optimized speed control and zone-based auto-landing to reduce track completion time
Technical Stack
Tech Stack: MATLAB, Simulink
Ritabrata Chakraborty
ML Intern
Research Engineer specializing in robotics, computer vision, and autonomous systems. Currently developing automated data annotation solutions with foundation models for autonomous vehicles at Uber.