 Large Scale DRL Robot Exploration Framework
Large Scale DRL Robot Exploration Framework
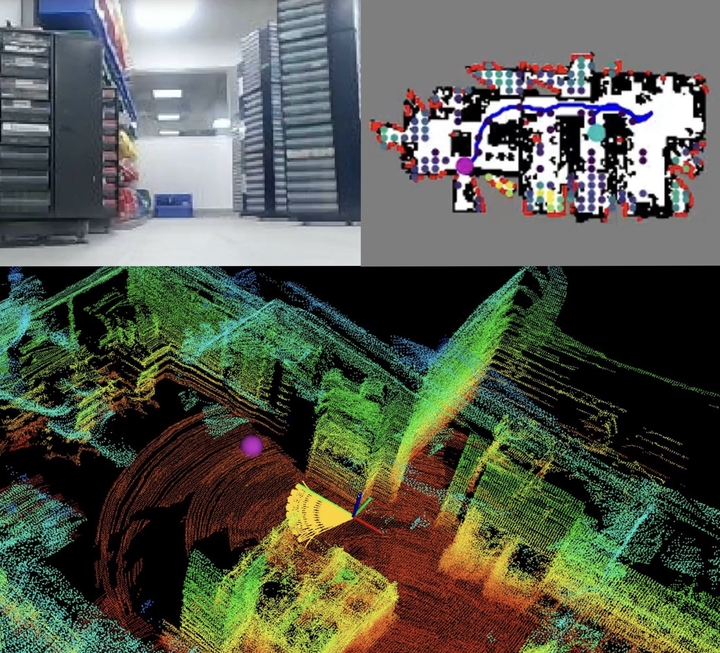
Overview
Deep reinforcement learning-based reactive planner for large-scale Lidar-based autonomous robot exploration with tunable exploration-exploitation control.
• Optimized distributed Soft Actor-Critic (SAC) training through comprehensive hyperparameter tuning with experience replay buffer optimization and adaptive learning rate scheduling
• Engineered Alpha Conditioning system with continuous parameter control for precise exploration-exploitation behavior modulation in robot navigation policies
Technical Stack
Tech Stack: PyTorch, Ray, Soft Actor-Critic (SAC), Graph Neural Networks
Ritabrata Chakraborty
ML Intern
Research Engineer specializing in robotics, computer vision, and autonomous systems. Currently developing automated data annotation solutions with foundation models for autonomous vehicles at Uber.