Multi-Critic DDPG for Autonomous Indoor Drone Navigation
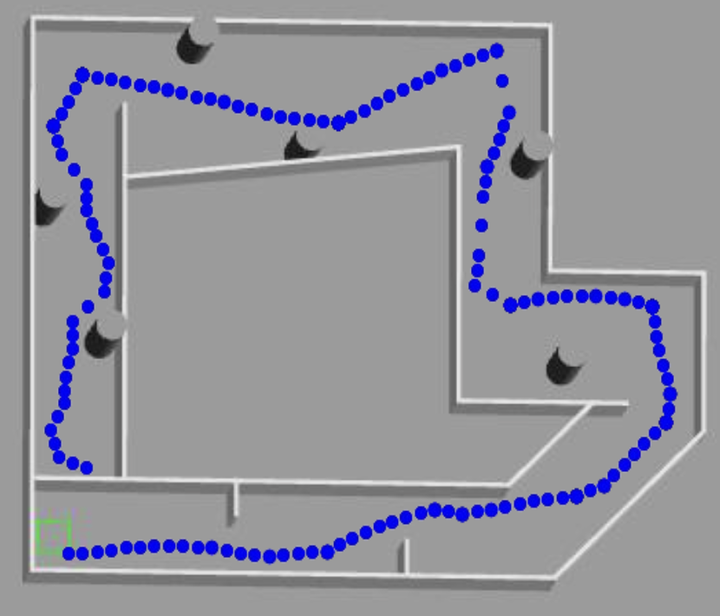 Simulation
Simulation
A novel approach combining importance sampling with DDPG for improved deep reinforcement learning performance and sample efficiency.
Ritabrata Chakraborty
ML Intern
Research Engineer specializing in robotics, computer vision, and autonomous systems. Currently developing automated data annotation solutions with foundation models for autonomous vehicles at Uber.