Path Planning of Low-Altitude UAV for Tree Canopy Tracking and Orchard Monitoring
 UAV Orchard Monitoring System
UAV Orchard Monitoring System
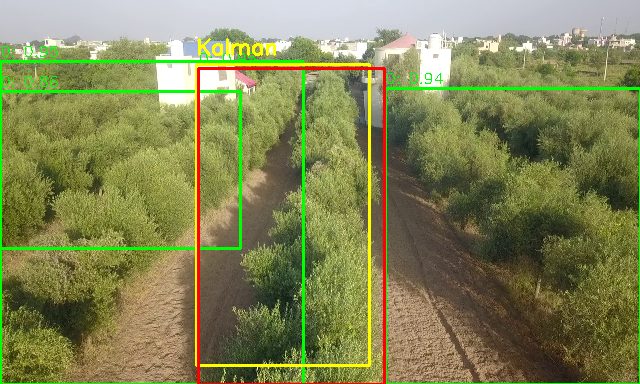
Monocular vision-based UAV treeline following system using instance segmentation and curve-fitting algorithms for precise orchard navigation under wind disturbances.
Ritabrata Chakraborty
ML Intern
Research Engineer specializing in robotics, computer vision, and autonomous systems. Currently developing automated data annotation solutions with foundation models for autonomous vehicles at Uber.