Vision-Attention-Driven Autonomous Navigation with Semantic Understanding
 Vision-Attention Navigation System
Vision-Attention Navigation System
Overview
Advanced autonomous navigation system that enhances CogniPlan with cross-attention mechanisms and semantic understanding capabilities for improved exploration strategies.
• Enhanced CogniPlan with cross-attention between frontier and node embeddings to enrich node representations
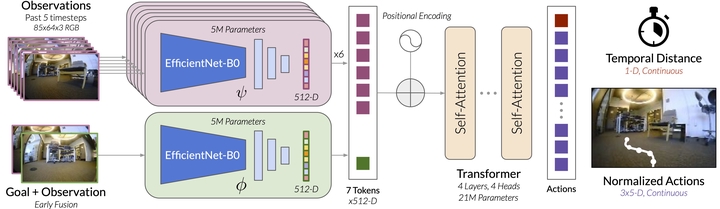
• Incorporated Visual Navigation Transformer (ViNT) to capture semantic context for adaptive exploration strategies
Technical Stack
Tech Stack: ROS Noetic (with Gazebo), PyTorch, Python
Ritabrata Chakraborty
ML Intern
Research Engineer specializing in robotics, computer vision, and autonomous systems. Currently developing automated data annotation solutions with foundation models for autonomous vehicles at Uber.